
 京公网安备 11010202008714号
京公网安备 11010202008714号
全部评论--
加载中…
时速120公里,前方锥桶阵突现!这不是电影桥段,而是高速路上的危险“盲盒”。对于任何搭载组合辅助驾驶功能的智能网联汽车而言,再华丽的参数、再炫酷的配置,都不及在高速施工场景下毫秒级的安全响应来得真实可贵。
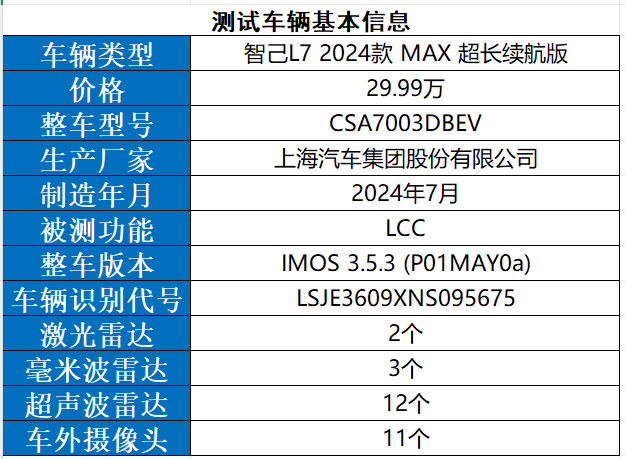
本期测评,我们把智己L7推向这场最严苛的“考场”——在模拟高速施工区的复杂场景中,测试其感知的锐度、决策的智慧与执行的果决。
2025智驾“封神榜”测评由长沙市智能网联汽车产业链办公室、湖南红网长沙站、湖南湘江智能科技创新中心有限公司联合委托国家智能网联汽车(长沙)测试区执行。该测评聚焦市面热门车型,在高速公路危险场景下测试其组合辅助驾驶功能表现,旨在为消费者选车提供权威参考。

为何执着于高速施工场景的极限测试?它关乎的不仅仅是便利,更是乘员及道路上所有参与者最核心的安全底线。以下是智己L7全部测试结果:

(如车辆在当前试验车速无法通过,则不进行更高车速测试;前方静止高速目标物场景:前方高速作业车处于静止状态;前车切出遇静止高速目标物场景:试验车辆跟随前车行驶,当前车距离静止目标物一定距离时,前车换道行驶。)
一、试验规程
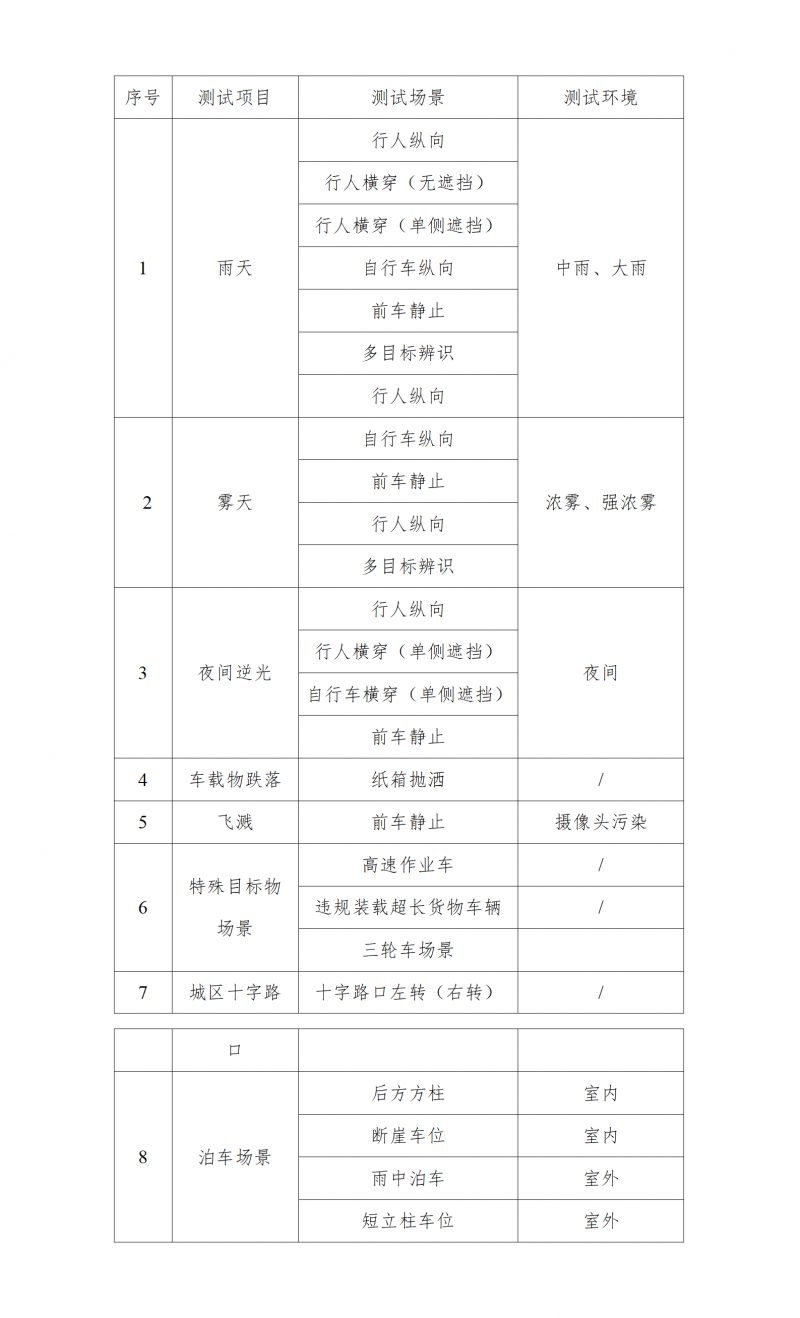
试验规程采用2024版智车信心度(C-IAC)测评体系,该体系是国内首个基于特殊气象环境和特殊交通参与者的智能驾驶危险场景测评体系,旨在帮助消费者认清智能驾驶汽车在特殊气象和危险场景下真实使用的功能水平。在2024版智车信心度(C-IAC)测试规程中,主要关注雨天、雾天、夜间逆光、高速巡航与城市巡航等8大测试项目25个测试场景,为消费者提供更为严谨科学的选车用车参考,也为车企更好地推动智能网联汽车功能与性能的提升、加强智能辅助驾驶的安全性、舒适性方面的研发提供更科学、更全面的参考。
试验工况表概览如下:
评级规程
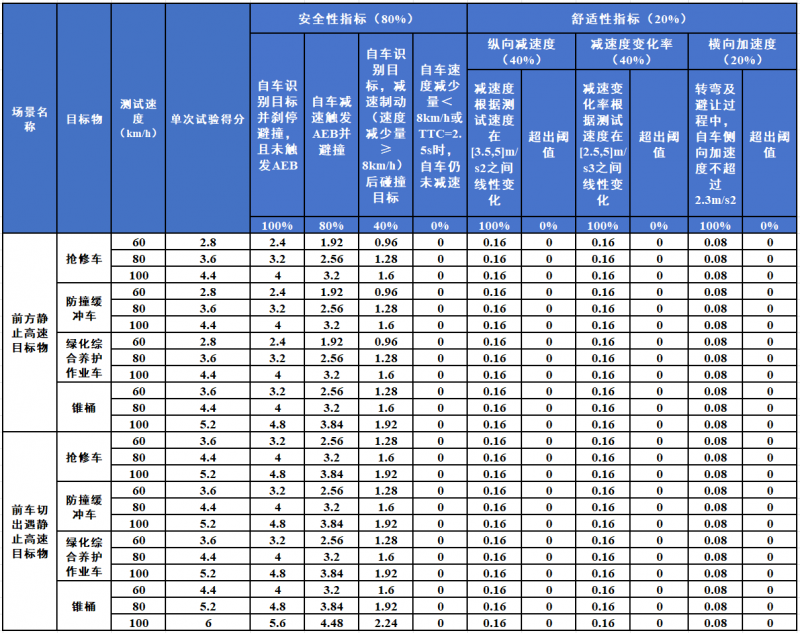
2024版智车信心度(C-IAC)从安全性和舒适性两个指标进行场景评价,本次测评巡航功能的具体评价方法及得分详见下表:
关于舒适性指标中的减速度规定具体如下:当自车车速大于72km/h时,减速度不应超过3.5m/s2;当自车车速小于18km/h时,减速度不应超过5m/s2;当自车车速为18km/h至72km/h之间,减速度线性变化,如下图所示:
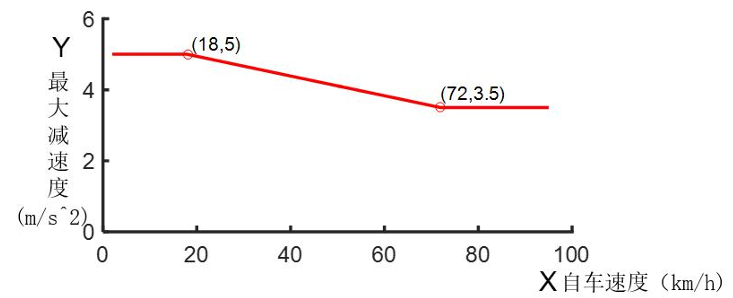
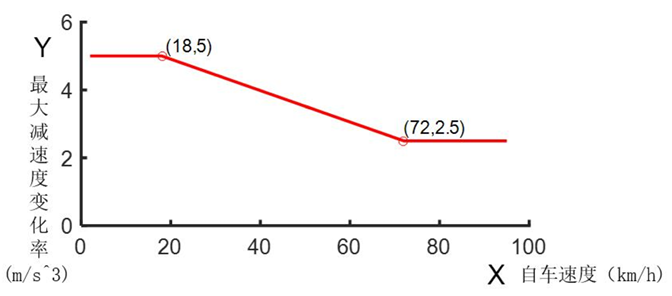
减速度变化率规定具体如下:当自车车速大于72km/h时,减速度变化率不应超过2.5m/s3;当自车车速小于18km/h时,减速度变化率不应超过5m/s3;当自车车速为18km/h至72km/h之间,减速度变化率线性变化,如下图所示:
每个测试场景最多进行3次试验,若3次中有2次满足要求,则视为该工况通过测试;若前2次试验均能通过测试,则不进行第3次试验。若3次试验中有2次及2次以上车辆不能通过测试,则该工况未通过试验。测试场景最终得分为2次试验得分相加。
测评详解
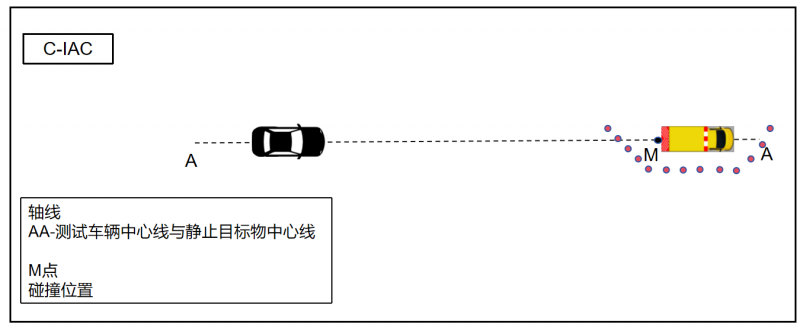
【前方静止高速作业车目标物】
将目标物放置在车道中心线上,试验车辆纵轴线与目标物纵轴线重合,目标物为静止状态。试验车辆车速分别为60km/h、80km/h、100km/h,设置目标物尾部为碰撞点。
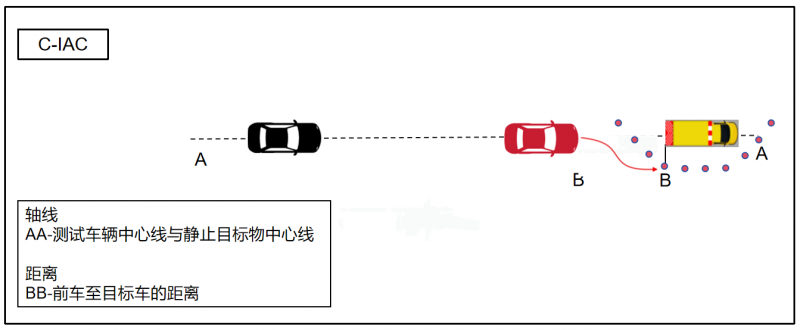
【前车切出遇静止高速作业车目标物】
将目标物放置在车道中心线上,试验车辆纵轴线与目标物纵轴线重合,目标物为静止状态。前车车速分别为60km/h、80km/h、100km/h,试验车辆开启NP功能或者巡航功能跟随前车行驶,当前车距离静止目标车的TTC达到阈值时,前车切出,TTC具体参数如下所示。
|
序号 |
试验车辆车速 |
前车车速 |
试验次数 |
前车切出TTC |
前车切出横向速度 |
|
1 |
60k m/h |
60 km/h |
3 |
1.5 |
5±1km/h |
|
2 |
80k m/h |
80 km/h |
3 |
2 |
5±1km/h |
|
3 |
100k m/h |
100 km/h |
3 |
2.5 |
5±1km/h |
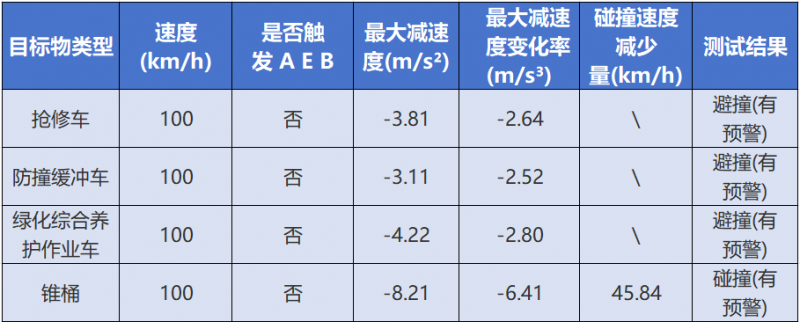
【前方静止高速目标物】测试结果如下
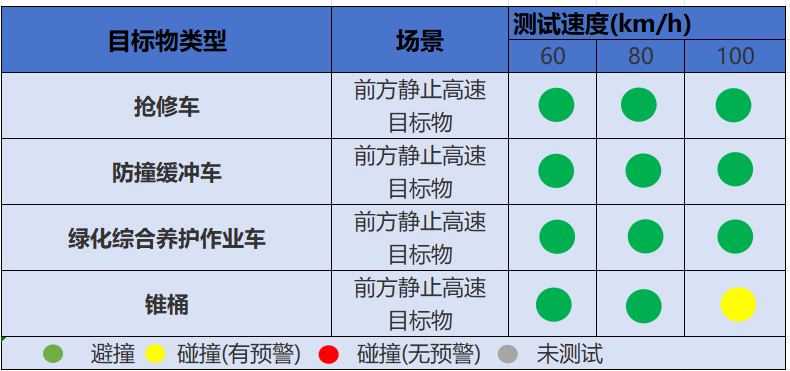
在前车静止高速目标物场景中,智己L7仅在kph100km/h的条件下未通过锥桶场景,但发生碰撞前进行了预警提示,其余场景顺利通过,具体数据如下:
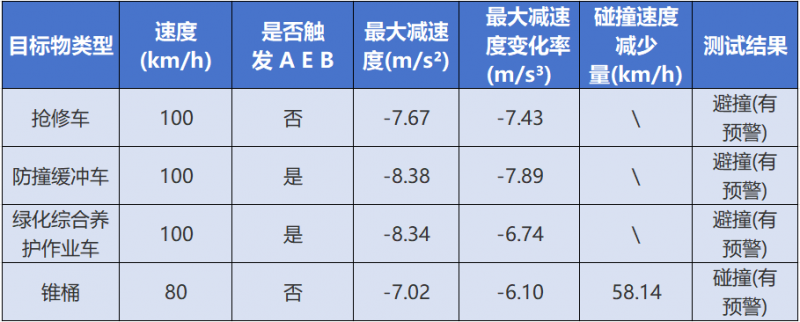
【前车切出遇静止高速目标物】测试结果如下
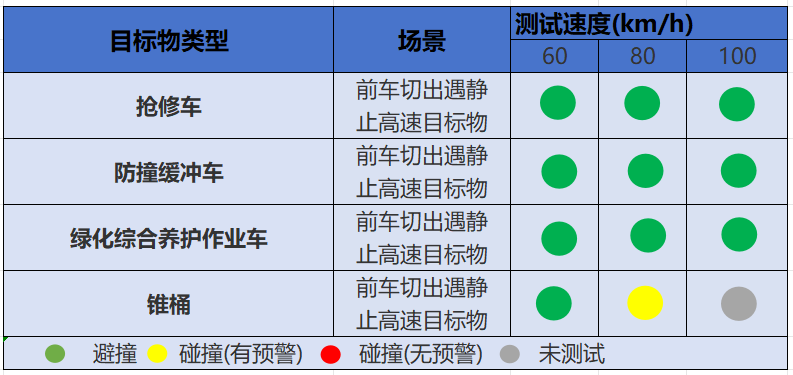
除时速100km/h条件下的锥桶场景外,智己L7能够有效识别前方静止高速作业车目标物,并执行减速避撞动作。然而,在时速80km/h的同等条件下,当切出前车后暴露静止锥桶时,车辆虽提前发出碰撞预警信息,但仍发生了碰撞。初步分析,可能原因是系统识别前方锥桶后,执行机构响应未能及时完成制动或规避动作。具体数据如下:
智己L7的测试结果汇总如下:
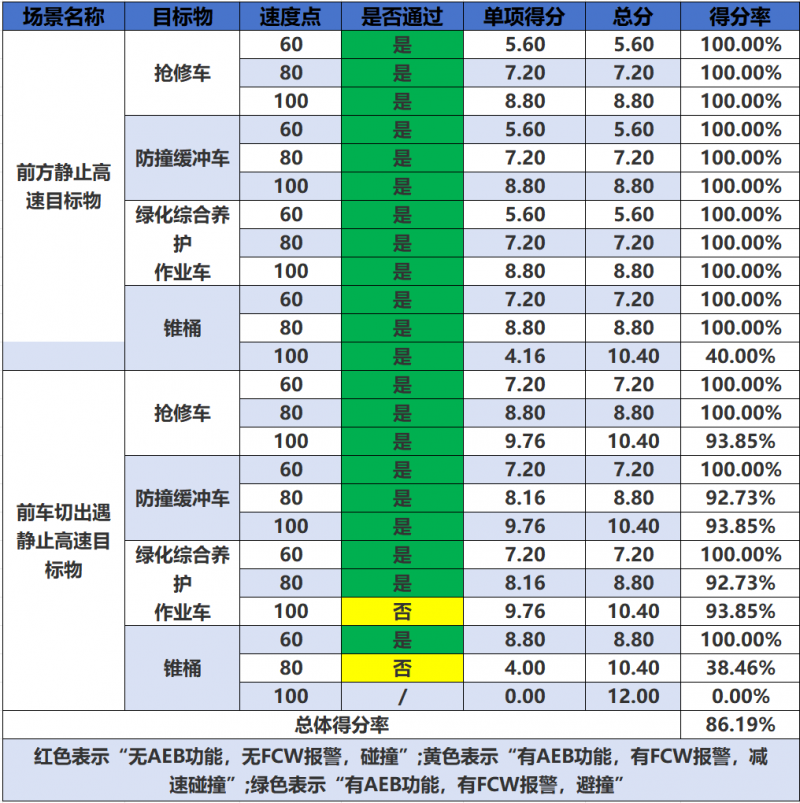
整体结论
在在2024版智车信心度(C-IAC)测试中,智己L7 2024款 MAX 超长续航版的总体得分为86.19%。测试结果显示:本次测试车型智己L7在“前车静止”与“前车切出”两大场景下,车辆均能有效识别前方静止的高速作业车目标物,并执行减速避撞动作。然而,在对静止锥桶的测试中,表现存在速度依赖性:在较低速度下,系统能够识别锥桶,但随着速度提升,发生了碰撞。值得指出的是,碰撞发生前系统均成功发出了预警信号。初步分析认为,可能的原因是:感知系统虽能识别前方锥桶,但留给执行系统(如制动、转向)的响应时间不足,导致无法在高速下及时完成避撞操作。
在此,国家智能网联汽车(长沙)测试区建议广大车主朋友们,在高速行驶时与前车保持安全车距,适当减速,保障行车安全。
想了解热门车型的智能驾驶真实实力?请持续关注 2025智驾“封神榜”测评,更多车型结果陆续发布!
©神选车
违法和不良信息举报:010-51254090
请您登录神选车账号参与评论